Data Repository
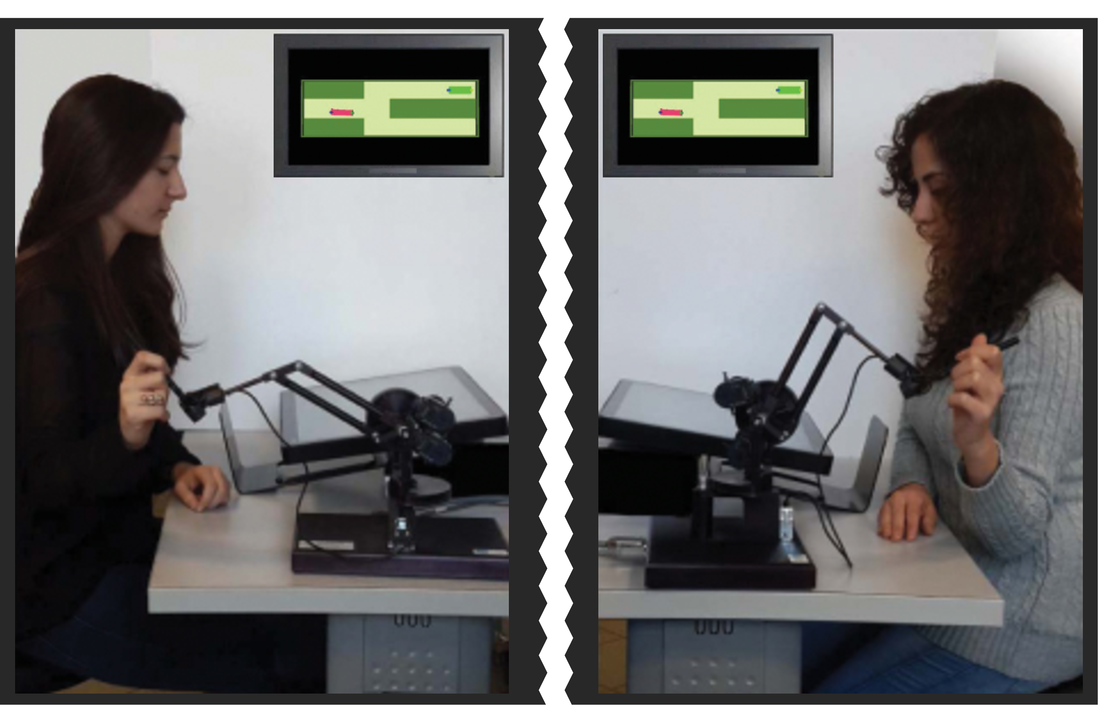
This page presents haptic interaction data collected during the operation of both Human-Human and Human-Robot dyads in joint object manipulation scenarios. These data is publicly available for research purposes. However, we kindly request you to cite our work if you intend to use the relevant data.

|
Koc-TUM Physical Human-X Interaction Repository
Go to data download page Mirror sites: http://rml.ku.edu.tr/koctum http://koctum.itr.ei.tum.de/ |
|
Haptic Human-Human Interaction - Behavior Recognition Dataset
Go to data download page Mirror site: http://rml.ku.edu.tr/HHIBehaviorDataset |

These works are licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.